Applanix POSPac 软件是强大的定位定姿数据后处理软件,对集成了全球导航卫星系统
(GNSS) 与惯性导航系统的定位定姿系统(POS LV) 所采集的数据进行处理,¾ 过系统运算可获取地面测图传感器的高精度直接地理参考数据。
优化陆地测图环境,兼容多种传感器,高效率、高精度地直接地理参考。POSPac 软件提供一整套线性的数据处理流程,通过解算可得到最精确的结果数据。系统中设计的工具可为您提供:
• 对POS LV 系统中记录的全球导航卫星系统(GNSS) 和惯性导航数据计算得到高精度的定位定姿数据
• 在GNSS 信号易失锁的建筑物密集城市或高密度植被覆盖区,仍然保持可靠精度取得稳定、不间断、高精度的数据
• 在任何全球导航卫星系统(GNSS) 信号失锁的情况下通过后处理得到高精度定位定姿数据
• 导入、管理和评估全球导航卫星系统(GNSS)参考站数据与POS LV 系统数据
• 根据用户自定义的数据格式自动输出数据,支持多种测量应用。
集成了新一代的Applanix SmartBaseTM 模块和Applanix IN-FusionTM 技术,POSPac 软件为地面
测量工程高效地提供精确、可靠的数据。
POSPac 软件让您得到可靠、强大、不间断的精确数据。
POSPac MMS 用户可定制易操作的全新界面,极大地提高了工作效率
• 用户可定制的工具条和菜单 – 扩展工具可直接加到工具条中可同时显示多种用户视角(3D,2D 和点信息表格),各视图均以图层表示
• 用户可定制的轨迹显示风格:实时、后处理、定位均方根和处理中模式
• 多特性可选择的交互界面
• 可收缩展开的工程浏览器,您可快速查询各阶段任务情况
• 统一的项目管理,设置方便
• 项目管理和报告选项
• 黑白背景供选择
• 批处理管理,让您几个操作在短时间内即可完成大批量的数据处理
后期处理的优势
• 精度的提高—基站数据和反向平滑算法能
显著提高定位定姿精度
• 可靠性的提高—后期处理可纠正设置错误。
此外,如果主要数据源不可靠,还可以调
用替换的GPS 差分数据源
 |
| 直观、可定制的界面 |
|
1. 定制您查看细节的方式
2. 在属性窗口中查看任何数据项的属性信息
3. 工程浏览器有助于快速浏览数据
|
4. 输入命令即可轻松进入定制的菜单和工具条
5. 在各窗口之间简单快速地切换
6. 多任务多数据集的批处理 |
POSPac MMS for Land:从工程的开始到完成,为地面测量传感器提供高精度直接地理参考数据
1. 数据的输入与分析
把数据从POS LV 导入到POSPac MMS 中很简单,只需定位到存储定位定姿数据的计算机或存储卡,再点击
"GO"命令按钮。软件就会自动分析并取得所需文件。紧接着软件会对每个文件做质量检查,使用户能迅速
得知数据是否完好。实时的定位定姿数据分析和状态可帮您更深入分析数据。
2. 从互联网下载数据
只需一步,即可输入参考站数
据和精确的星历数据。在¾ 过优化的多基站网络上鼠标轻点几下即可查找、预览和下载所有参考站数据。
自动网络设置: 用"Smart
Select"轻松找到合适的基站
"Smart Select"自动地选择下载最适合参考接收机的Applanix
SmartBase 网络数据并导入工程。它不只选择包含测量轨迹的网络数据,同时也验证观测数据的质量决定基站是否合适所用网络。
POSPac 后处理软件 :
更高精度的结果
POSPac MMS 提高了测量数据的精
度,特别是当您的GPS 信号出现问
题的情况,比如种满了树木的街道
或是市中心高楼对GPS 信号的遮挡
和反射。
即使面临棘手的GNSS 环境,依然能够保证
• 最大程度地消除GPS 信号失锁带来的影响
• 高精度的定位定姿数据
• 稳定、可靠、可复验的数据
• 使用POS LV 紧密耦合模式,即使只取得1
颗卫星的Ô 始数据,也能进行精确的数据后
处理
• 支持多种投影格式(UTM、Gauss-Kruger、
TM、Lambert、Orthographic、US State
Plane 等),您可自由选择输出
• 惯性导航处理器:使用提取模块输入数据计算出紧密耦合的导航数据。GNSS、DMI、GAMS 数据相结合,经过后期处理的正算反算得到平滑的系统行驶路线
• 输出:将实时数据或后处理数据从WGS84 坐标系转换到多种用户定制的坐标系
• 显示:曲线和图表显示输出数据便于简单分析和质量控制与保证
• 批处理:用于多任务大批量数据处理的高效率自动处理步骤
特性
专为迎接地面移动测量的挑战定做,POSPac
MMS 是道路测量的最佳选择。路面检查、地理信息系统(GIS)、资产管理及一些特殊应用如:自动车辆导航和高性能车辆动力学。在最为棘手的GNSS 环境,POSPac MMS 对数据的精确、可靠性和可复验性提出了新的行业标准。特性包括:
• 增强规划能力:强大、独立, 能支持各种类型的卫星数据。可见卫星图表帮您找到最佳的数据采集时间,保证了数据采集效率
• 数据输入:从POS LV 存储的原始数据中提取实时的导航数据和传感器数据
• SMARTBASETM:运用了虚拟参考站(VRS)
技术,数据采集效率比采用单基站方式大大提高。专用GNSS 参考站网络中的观测值用于处理计算大气延迟及其它因素产生的误差
优势
一套完整的数据后处理工具为您提供了线性的工作流
程,让您轻松得到最佳的处理结果
• 扩大范围:消除了限制高精度移动测量效率的障碍,让您高效省时地完成大区域高精度的测量任务
• 提高精度:Applanix 的智能参考站选择技术自动选择、下载并导入最佳参考站数据
• 增强粗差检测能力:严格的质量控制和高级算法,确保您 第一次解算就能得到正确结果,最大限度减少返工率
• 提高生产效率:通过严格的质量控制减小部署成本和生产成本,扩大测量距离和区域,降低了测图的返工率
完整的解决方案
POSPac 软件利用Applanix 的惯性导航与全球导航卫星系统(GNSS) 集成技术为现代的专业测量人员提供简单的地面测量数据后处理流程。强大的数据处理工具和技术,让您从工程的开始到完工都拥有绝对优势。
| 最低配置: |
推荐配置: |
| CPU |
Pentium 3 800MHz 或等同配置 |
CPU |
32 位Pentium 4 2.0GHz 或同等配置 |
| 内存 |
512 MB RAM |
内存 |
1 GB RAM |
| 操作系统 |
Microsoft Windows® XP Professional
(32 and 64 bits), Windows® Vista
(32 and 64 bits) |
操作系统 |
Microsoft Windows® XP Professional
(32 and 64 bits), Windows® Vista
(32 and 64 bits) |
| 磁盘空 |
安装:400 MB, 数据存储:1GB |
磁盘空间 |
安装:400 MB, 数据存储:多于4GB |
| 分辨率 |
1024×768 pixels |
分辨率 |
1028×1024 pixels |
| 区域 |
English(US) |
区域 |
English(US) |
| USB 接口 |
软件狗:2 个USB1.1 接口 |
USB 接口 |
软件狗:2 个USB1.1 接口 |
| PC Card 读卡器 |
读取定位定姿系统(POS) 的数据 |
PC Card 读卡器 |
读取定位定姿系统(POS) 的数据 |
| 互联网 |
下载Microsoft Framework |
互联网 |
下载Microsoft Framework® |
| |
|
鼠标 |
使用滚轮鼠标能更好地控制视角 |
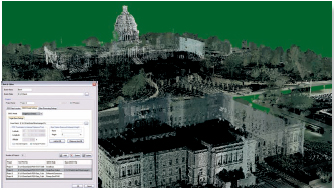 |
POSPac MMS 中POSPC 模块正在将激光雷达扫描仪获取的原始数据与导航数据解算处理获得地理参考点云数据( 如上图所示)。 |
|

